

目录
快速导航-

理论研究 | 高重合度直齿圆柱齿轮传动系统耦合动态特性研究
理论研究 | 高重合度直齿圆柱齿轮传动系统耦合动态特性研究
-

理论研究 | 基于微晶模型的航空齿轮传动流-热-固多场数值模拟
理论研究 | 基于微晶模型的航空齿轮传动流-热-固多场数值模拟
-

理论研究 | 基于改进的A算法的复杂环境下路径规划研究
理论研究 | 基于改进的A算法的复杂环境下路径规划研究
-

理论研究 | 2-UPS/RRR并联机构位置逆解与可达工作空间分析
理论研究 | 2-UPS/RRR并联机构位置逆解与可达工作空间分析
-

理论研究 | 直齿锥齿轮齿面建模及强度对比研究
理论研究 | 直齿锥齿轮齿面建模及强度对比研究
-

理论研究 | 超磁致伸缩致动器非线性动力学的时滞反馈控制研究
理论研究 | 超磁致伸缩致动器非线性动力学的时滞反馈控制研究
-

设计计算 | 一种单自由度螺旋形空间折展机构的设计与分析
设计计算 | 一种单自由度螺旋形空间折展机构的设计与分析
-

设计计算 | 基于混合动力乘用车的正时齿形链系统设计分析
设计计算 | 基于混合动力乘用车的正时齿形链系统设计分析
-
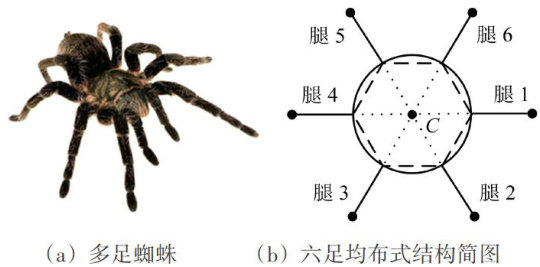
设计计算 | 具有弹跳特性的六足机器人结构设计与仿真
设计计算 | 具有弹跳特性的六足机器人结构设计与仿真
-

设计计算 | 具有两种平移特性的三平移并联机构设计与分析
设计计算 | 具有两种平移特性的三平移并联机构设计与分析
-

设计计算 | RV减速器角度误差调整及公差分配方法
设计计算 | RV减速器角度误差调整及公差分配方法
-

设计计算 | 行星展收式可重构轮-履复合车轮变形机制研究
设计计算 | 行星展收式可重构轮-履复合车轮变形机制研究
-

设计计算 | 一种新的角不对中花键鼓形修形设计方法
设计计算 | 一种新的角不对中花键鼓形修形设计方法
-

试验分析 | 楔块磨损对离心脱开型超越离合器性能的影响
试验分析 | 楔块磨损对离心脱开型超越离合器性能的影响
-

试验分析 | 干切滚齿机床热态特性的多源信息融合测试及分析
试验分析 | 干切滚齿机床热态特性的多源信息融合测试及分析
-

试验分析 | 考虑不对中误差的人字齿轮双侧应力偏载分析
试验分析 | 考虑不对中误差的人字齿轮双侧应力偏载分析
-

试验分析 | 弹跳机器人着陆姿态分析及其控制方法研究
试验分析 | 弹跳机器人着陆姿态分析及其控制方法研究
-

开发应用 | 复合节距块式链传动的链轮齿形设计
开发应用 | 复合节距块式链传动的链轮齿形设计
-
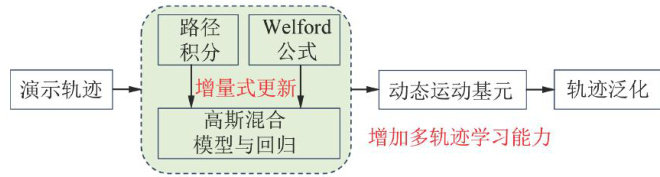
开发应用 | 基于复合运动基元的机器人多演示轨迹在线建模研究
开发应用 | 基于复合运动基元的机器人多演示轨迹在线建模研究
-

开发应用 | 某重卡变速器啸叫识别及解决方法
开发应用 | 某重卡变速器啸叫识别及解决方法
-

开发应用 | 一种"长征"轨迹的新能源车结构设计与仿真分析
开发应用 | 一种"长征"轨迹的新能源车结构设计与仿真分析
















 登录
登录